




Aunque hemos visto a muchos robots hace maravillas y demostrar una agilidad asombrosa, todavía hay muchos detalles finos y mejoras que pueden realizarse. Los robots no pueden hacer todo lo que hacen los seres humanos al caminar. Pero hay un prototipo que ha logrado reproducir la mayor expresión de gracia, destreza y alta cultura que existe en este aspecto: La caminata lunar. No nos referimos a ir a los saltos como un astronauta. Hablamos de ese extraño e inexplicable embrujo por el cuál una persona parece poner un pide delante del otro y sin embargo retrocede. El moonwalking de Michael Jackson.
Las piernas robot
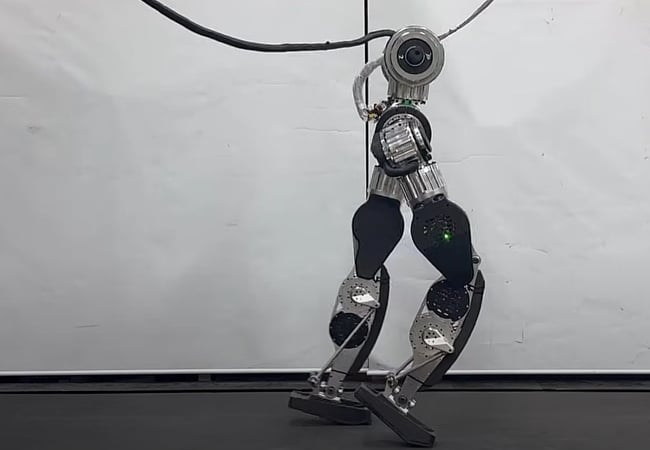
El laboratorio KAIST ha producido un robot (piernas y torso) que es capaz de moverse a unos 12 kilómetros por hora y superar escalones de hasta 30 centímetros de alto. Tiene además un nivel de estabilidad destacable que puede observarse en el modo en que supera el terreno escabroso. Lo más notable de este ingenio es la capacidad para adoptar modalidades que otros no consideran o que cumplen con dificultad. Además de la caminata lunar, pueden avanzar agachado prácticamente sin cambiar su velocidad.
Entre las claves para conseguir este nuevo modelo se destaca la producción por parte de los investigadores de cada una de las piezas principales. El sistema utiliza una IA de desarrollo propio que fue entrenada en un entorno virtual.
Objetivos
Los desarrolladores esperan alcanzar los 14 kilómetros por hora y escalones de hasta 40 centímetros. Además de ampliar las maniobras que puede realizar la unidad.
Una paso fundamental se dará cuando se complete el cuerpo el robot, lo que podría implicar nuevos desafíos. Cargar objetos, operar válvulas y abrir puertas, entre otras operaciones. En última instancia la idea es que el robot pueda realizar maniobras de gran complejidad en un entorno industrial.
La pierna robot
Mientras el equipo trabajaba en la unidad principal se dio tiempo para producir una pierna robot que operaba en soledad. La agilidad y estabilidad de este ingenio fue destacable. Logró realizar saltos y piruetas. En este caso no se contó con una referencia humana para el entrenamiento.





