




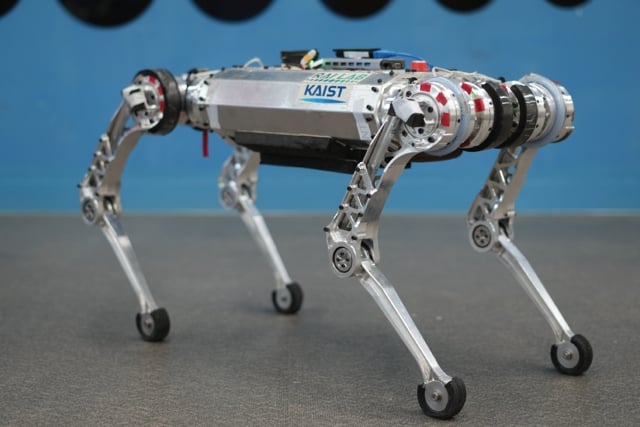

Un grupo de desarrolladores del laboratorio RaiLab de Corea del Sur, especializados en robótica e inteligencia artificial, han creado un robot de cuatro patas capaz de atravesar entornos complejos utilizando técnicas de parkour. El robot es conocido como Raibo y ya ha demostrado sus capacidades, por lo que una segunda versión está en camino.
Por supuesto, tener cuatro patas resulta mucho más conveniente para ciertas maniobras, aunque también implica algunos desafíos para otras. Aún así en general podemos decir que facilita mucho la estabilidad del robot.
Funcionamiento
Lo verdaderamente destacable de este desarrollo es que el recorrido es determinado por la máquina. El operador humano solo le apunta un lugar a llegar como objetivo. Una vez establecida la meta el sistema pone en juego dos módulos.
El primero de ellos es el planificador. Este módulo se encarga de establecer el recorrido más seguro para el robot. El segundo es el rastreador, que se encarga de que los pies se ubiquen en el lugar adecuado en cada momento y monitorear el éxito de la operación.
Un punto a destacar es que no se trata de instancia separadas. El planificador y el rastreador actúan al unísono. El planificador plantea varios posible escenarios y elige el que tiene menor costo. Pero es capaz de cambiar el recorrido si el rastreador le indica que es necesario. A cada paso el robot reconsidera su trayectoria.
Entrenamiento
El planificador fue entrenado de una manera similar a la de tantos modelos de inteligencia artificial. En una segunda etapa de desarrollo se realizaron simulaciones para evaluar los componentes del robot. En una tercera fase el robot fue puesto a prueba en entornos de laboratorio.
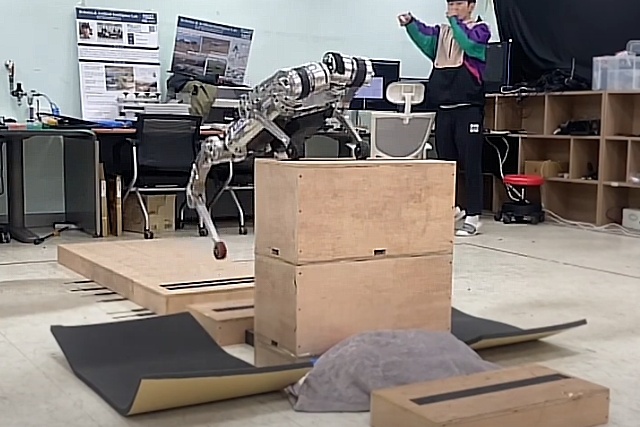
Los desarrolladores descubrieron que el robot podía correr de forma vertical por las paredes, a corta distancia, por supuesto. También observaron su capacidad para subir rampas, escaleras y saltar.





