


Presentamos una nueva serie de publicaciónes bajo el nombre “paraguas” Escuela de ROBÓTICA. Mediante esta propuesta, buscamos guiar al lector en un recorrido teórico-práctico, cuidado, bien estructurado y que de lugar a la posibilidad de desarrollarse en un mundo creativo y lleno de posibilidades, en el que covergen la electrónica, el hardware y la programación.
Programar una placa Arduino para robótica no se reduce a escribir instrucciones: implica enseñarle al circuito a reaccionar según reglas.
Este Informe USERS recorre ese pasaje, desde la estructura básica de un programa hasta los distintos entornos que hoy ofrece el ecosistema Arduino para proyectos de robótica, automatización y control industrial.
Auto: Claudio Peña
De la conexión física a la regla explícita
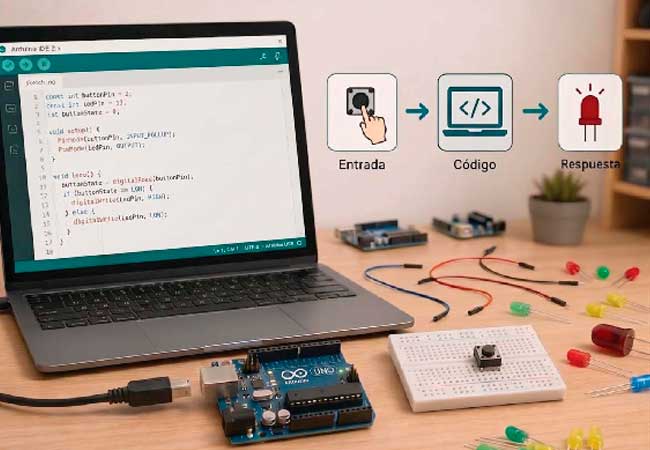
Un programa de Arduino se organiza en dos partes que conviene entender desde el inicio. La función setup() deja el circuito preparado antes de que empiece a operar. La función loop() repite el ciclo de funcionamiento mientras la placa esté encendida.
Sobre esa base aparece la primera herramienta que vuelve inteligente al montaje: las variables. Un dato booleano basta para guardar si un botón está activo. Un entero permite sostener un contador a lo largo del ciclo.
Sin variables, la placa solo puede reaccionar al instante. Con ellas ya puede apoyarse en un dato anterior y decidir el paso siguiente.
La estructura if/else lleva esa lógica hasta su forma más útil. Si una condición se cumple, ocurre una acción. Si no se cumple, ocurre otra.
El montaje deja de depender solo del cableado y pasa a estar gobernado por una regla explícita. A medida que el programa crece, las estructuras for y while organizan la repetición, y las funciones permiten separar acciones reutilizables sin copiar el mismo bloque cada vez.
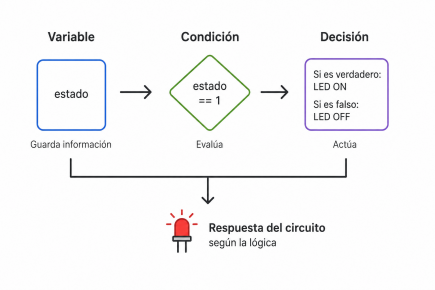
Aquí se juntan tres piezas decisivas: una variable que conserva información, una condición y una estructura que decide qué hacer con ese resultado. Cuando esas tres partes trabajan juntas, el montaje empieza a responder de acuerdo con una lógica explícita.
El entorno clásico, mejorado
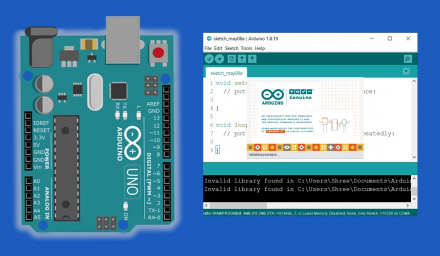
Arduino IDE 2.x sigue siendo la puerta de entrada más natural para programar placas. Dentro de la robótica educativa es la opción más útil cuando el comportamiento vive entero dentro de la placa.
La estructura del sketch (el programa Arduino básico) no cambió. El entorno, en cambio, se modernizó para volver más cómoda la lectura del programa cuando empieza a crecer.
Para montajes locales donde la placa lee sensores y reacciona sobre actuadores, el IDE clásico sigue siendo la herramienta razonable. Resuelve el problema sin sumar capas innecesarias.
El código y la respuesta física tienen una relación inmediata que facilita aprender y depurar. Ese sigue siendo el terreno donde el entorno clásico rinde mejor, sin la fricción que sumarían un panel remoto o una capa visual sobre un proyecto que todavía no las necesita.
Conviene entender Arduino IDE 2.x no como la única vía posible, sino como la evolución más directa del entorno tradicional dentro de un ecosistema que ahora ofrece varios caminos según el tipo de proyecto que se quiere construir.
Cuándo conviene mirar más allá del sketch
Cuando el proyecto pide algo más que una respuesta local, conviene mirar otras opciones del ecosistema.
Arduino Cloud agrega una capa externa de supervisión y control. La lógica sigue corriendo en la placa, pero el estado del circuito puede consultarse desde un panel externo o ajustarse a distancia.
Tiene sentido cuando el sistema se instala lejos del desarrollador o cuando varias personas necesitan seguirlo en simultáneo.
Arduino App Lab cambia la forma de organizar el código. La lógica ya no se escribe en un sketch lineal, sino que se apoya en módulos visuales y proyectos guiados. Resulta útil en prototipos donde la interfaz importa tanto como la conducta interna.
PLC IDE se ubica en otro plano. Resuelve problemas más cercanos al control industrial, donde el comportamiento se organiza por secuencias y estados, como en los autómatas programables (PLC) que se usan en planta.
El criterio para elegir no debería ser cuál parece más moderna, sino qué necesita el proyecto.
Mientras alcance con una placa local y una relación directa entre entrada y salida, no hace falta agregar capas. Cuando aparece una necesidad concreta de supervisión remota o de control más estructurado, conviene saltar al entorno que responde mejor.
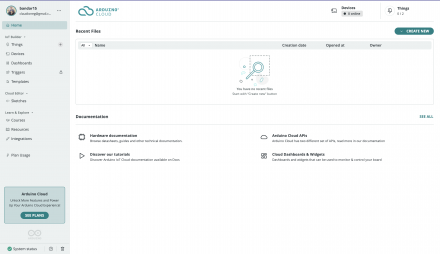
El interés de Arduino Cloud (https://app.arduino.cc/) no está en reemplazar la lógica que vive dentro del programa, sino en agregar una capa externa de supervisión y acceso. La placa sigue necesitando un comportamiento propio para leer entradas, actualizar estados y activar salidas. Lo que cambia es que parte de esa información ya no queda encerrada en el circuito: puede mostrarse fuera del montaje, quedar disponible en un panel o vincularse con controles remotos.
Encuentra la versión completa de la publicación en la que se basa este resumen, con todos los detalles técnicos en RedUSERS PREMIUM
También te puede interesar:
ESCUELA DE ROBÓTICA: CIRCUITOS FUNCIONALES PARA ROBÓTICA
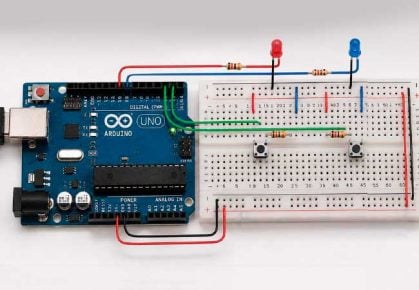
En este segundo Informe de la Escuela de Robótica, el trabajo deja de apoyarse solo en conceptos básicos y entra en el terreno del montaje funcional de los elementos básicos. Empezamos a trabajar con circuitos que no solo deben quedar bien conectados, sino también responder correctamente. A partir de prácticas simples con protoboard, LEDs, pulsadores, buzzers y relés, iremos construyendo una forma de pensar que será decisiva en los proyectos siguientes: cada componente importa por la función que cumple dentro de un sistema que debe comportarse con coherencia.
Lee todo lo que quieras, donde vayas, contenidos exclusivos por una mínima cuota mensual. Solo en RedUSERS PREMIUM: SUSCRIBETE!