


Presentamos una nueva serie de publicación bajo el nombre “paraguas” Escuela de ROBÓTICA. Mediante esta propuesta, buscamos guiar al lector en un recorrido teórico-práctico, cuidado, bien estructurado y que de lugar a la posibilidad de desarrollarse en un mundo creativo y lleno de posibilidades, en el que covergen la electrónica, el hardware y la programación. En esta 2da entrega: CIRCUITOS FUNCIONALES PARA ROBÓTICA.
En este segundo Informe de la Escuela de Robótica, el trabajo deja de apoyarse solo en conceptos básicos y entra en el terreno del montaje funcional de los elementos básicos. Empezamos a trabajar con circuitos que no solo deben quedar bien conectados, sino también responder correctamente. A partir de prácticas simples con protoboard, LEDs, pulsadores, buzzers y relés, iremos construyendo una forma de pensar que será decisiva en los proyectos siguientes: cada componente importa por la función que cumple dentro de un sistema que debe comportarse con coherencia.
Auto: Claudio Peña
De la protoboard al circuito legible
El Informe parte de una idea central para cualquier proyecto de robótica con Arduino: antes de programar una respuesta, el circuito debe estar bien armado. La protoboard deja de presentarse como una simple placa de pruebas y pasa a entenderse como una superficie organizada por zonas conectadas, rieles de alimentación y cortes internos que determinan el recorrido eléctrico. Esta lectura previa permite evitar errores comunes, como asumir que todos los puntos están unidos o distribuir la alimentación sin orden.
A partir de ese criterio, el montaje con varios LEDs funciona como primer ejercicio de lectura de circuito. Los LEDs no se trabajan solo como luces, sino como salidas visibles capaces de representar estados del sistema.
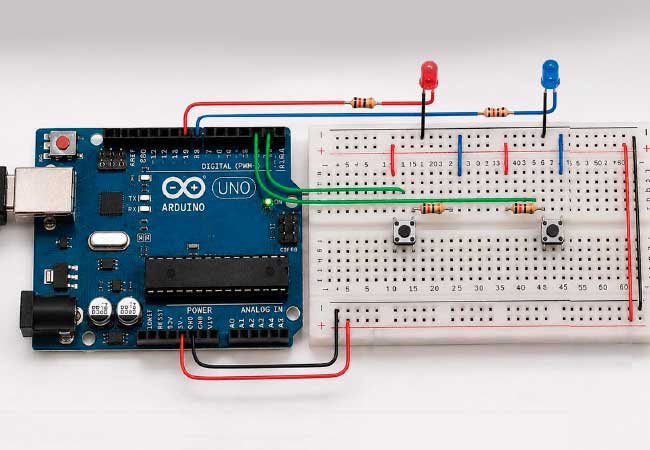
La resistencia en serie cumple un papel técnico clave: limita la corriente y permite que cada salida opere dentro de un margen seguro. Al integrar seis LEDs con Arduino UNO, cables de puente y resistencias, el Informe muestra cómo una misma lógica de conexión puede repetirse en varias salidas sin perder claridad en el armado.
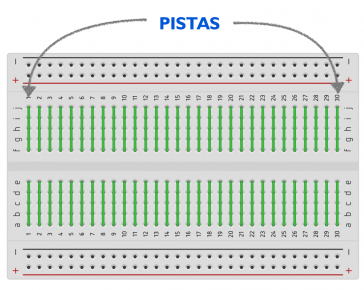
Lo primero que conviene entender es que la protoboard no conecta todos sus puntos entre sí. Sus agujeros están agrupados internamente en zonas. En la parte central, lo habitual es encontrar grupos de cinco puntos conectados en una misma línea. Eso signifi ca que, dentro de cada pequeño bloque, los terminales comparten continuidad eléctrica. Si se inserta una pata de un componente en uno de esos puntos y un cable en otro del mismo grupo, ambos quedan unidos aunque desde arriba no se vea ningún puente.
Entradas estables, rebote y lectura confiable
El paso siguiente es incorporar entradas mediante pulsadores. El botón introduce una acción externa capaz de modificar el comportamiento del sistema, pero también expone un problema habitual: una entrada sin referencia puede quedar flotante y entregar lecturas ambiguas. Por eso se explican las resistencias pull-up y pull-down, que fijan un estado conocido cuando el botón no está presionado. En un caso, la entrada queda referida a masa, en el otro, al nivel alto. En ambos, el objetivo es que Arduino interprete una señal definida.
El Informe avanza luego hacia el rebote, un fenómeno que aparece incluso cuando el montaje está correctamente conectado. Una sola pulsación física puede generar varias transiciones eléctricas durante unos milisegundos, y el programa puede interpretarlas como varias órdenes. La comparación entre un código que responde de inmediato y otro que espera brevemente antes de confirmar la lectura permite entender por qué una señal necesita estabilizarse antes de convertirse en decisión. Esta parte fortalece una noción básica de la robótica práctica: no alcanza con recibir datos, hay que recibirlos en condiciones útiles.
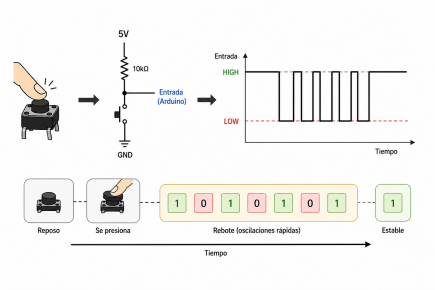
El problema aparece cuando el lector presiona el botón una sola vez, pero el sistema registra varias pulsaciones en lugar de una. Desde afuera, la acción parece limpia y simple. Se apretó una vez. Pero desde el punto de vista de la señal eléctrica, el cambio no siempre llega como un paso único y estable entre dos estados. Durante un instante muy breve, la entrada puede oscilar varias veces entre activado y desactivado antes de estabilizarse. A ese fenómeno se lo conoce como rebote.
Salidas sonoras, relés y separación entre control y carga
El buzzer amplía el repertorio de respuestas del sistema. Después del LED como salida visual, el zumbador introduce una salida audible que puede funcionar como confirmación, alerta o aviso de estado. El Informe distingue entre zumbador activo y pasivo. El primero emite un tono fijo cuando recibe señal, de modo similar a una salida encendida o apagada. El segundo permite generar frecuencias distintas mediante la función tone(), lo que abre la puerta a respuestas sonoras más variadas y controladas por programa.
El relé marca un avance conceptual dentro del recorrido. Ya no se trata solo de activar una salida pequeña desde Arduino, sino de separar el circuito de mando de la carga accionada. El montaje con transistor 2N2222, resistencia de 1 kΩ, diodo 1N4007 y LED de prueba muestra que la placa decide, pero no debe alimentar directamente una bobina o una carga que exige más corriente. El transistor actúa como conmutador y el diodo protege frente al pico inverso al apagar el relé. Así, el Informe instala una idea clave para futuros proyectos con motores, actuadores y módulos externos: controlar no es lo mismo que alimentar.
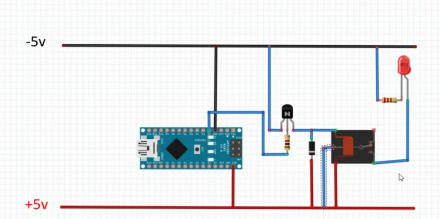
Conexión de los componentes para nuestro proyecto.
Encuentra la versión completa de la publicación en la que se basa este resumen, con todos los detalles técnicos en RedUSERS PREMIUM
También te puede interesar:
ESCUELA DE ROBÓTICA: FUNDAMENTOS DE LA ROBÓTICA
Presentamos una nueva serie de publicación bajo el nombre “paraguas” Escuela de ROBÓTICA. Mediante esta propuesta, buscamos guiar al lector en un recorrido teórico-práctico, cuidado, bien estructurado y que de lugar a la posibilidad de desarrollarse en un mundo creativo y lleno de posibilidades, en el que covergen la electrónica, el hardware y la programación. En esta 1er entrega: FUNDAMENTOS DE LA ROBÓTICA.
La robótica empieza mucho antes que los motores o los proyectos vistosos: nace en la capacidad de un sistema para captar una condición, procesarla y responder. Este material presenta esa base con ejemplos simples, desde Arduino hasta la alimentación eléctrica y el diagnóstico de fallas.

Lee todo lo que quieras, donde vayas, contenidos exclusivos por una mínima cuota mensual. Solo en RedUSERS PREMIUM: SUSCRIBETE!